 , где а — угол отклонения,
, где а — угол отклонения,В том случае, когда прибор работает как дальномер, каждая пара клиньев действует только от вращения дистанционного валика. И при измерении дальности до цели изображение в поле зрения прибора движется относительно измерительных марок как в левом, так и в правом поле зрения одновременно, компенсируя параллактический угол.
Когда прибор работает как высотомер, на компенсаторы оказывает действие не только измерительный валик, но и механизм вертикальной наводки. Если высота полета цели Н остается постоянной, то изменение параллактического угла а происходит автоматически по закону синусов; это изменение компенсируется дополнительным разворотом клиньев обоих компенсаторов пропорционально углу места цели. Шкала показывает неизменность высоты.
Когда цель меняет высоту, изображения цели и измерительных марск совмещаются по глубине с помощью измерительного валика.
Описанная система высотомера требует очень сложной кинематической схемы. Сопряжение движений измерительного валика, шкалы высот и изменений угла места цели с измерительными двуклиновыми компенсаторами осуществлено сложными дифференциальными механизмами. В результате конструкция стереовысотомера оказалась очень сложной и громоздкой по сравнению с обычными дальномерами такого типа.
Дальнейшее развитие прибора пошло по пути упрощения конструкции. Это стало возможным благодаря применению линзового компенсатора.
Как известно, линзовый компенсатор состоит из двух длиннофокусных линз — положительной и отрицательной, точно центрированных одна относительно другой. Пучок параллельных лучей выходит из такой системы параллельным без отклонения.
Если центр одной из линз сместить на величину А, то луч отклонится от своего направления на угол
, где а — угол отклонения,
/ — фокусное расстояние линзы. Это свойство линзового компенсатора использовано в последней модели стереовысотомера Цейсса.
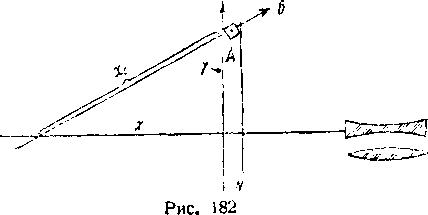
Вместо двух двуклиновых компенсаторов применяется один линзовый. Смещение линзы компенсатора производится с одной стороны от измерительного валика, с другой стороны от механизма вертикальной наводки таким образом, чтобы смещение линзы было пропорционально синусу угла места. Эта задача решается сравнительно просто при помощи синусного механизма, схематически показанного на рис. 182, где А (перемещающая гайка) движется по винту Б на отрезок х0. Проекция перемещения линзы по оси абсцисс будет равна где т — угол между направляющей N и винтом Б.
где т — угол между направляющей N и винтом Б.
Угол у — переменный, всегда равен углу места цели, а так как отклоняющий угол компенсатора пропорционален перемещению линзы, то для нее выполнено условие
Таким образом удается сильно упростить кинематическую схему но сравнению с нсрвий моделью стереовысотомера.
§ 15. Расстройства дальномеров и способы выверки
Причин расстройства оптической системы в условиях эксплоатации дальномеров очень много: тряска при перевозке, неизбежные толчки и сотрясения при установке и укладке в ящик, сильное нагревание солнцем днем и последующее охлаждение ночью и др. Дальномер поэтому должен иметь приспособления для устранения последствий его расстройства.
Ш


